Fig. 2.1
RoboSurgeon system. Three-dimensional (3D)

Fig. 2.2
Single port and the 3D head-mounted display that all surgeons wear
The RoboSurgeon system consists of three components: a three-dimensional (3D) head-mounted display (3D-HMD), handheld robot-like devices, and an endoscope manipulation robot (Fig. 2.1). Depending on the situation, part or all of this system is used, but the 3D-HMD, which provides six fields of vision, is always used by surgeons.
This surgery achieves four key “no’s”: no high costs, no CO2, no multiple ports, and no intraperitoneal injury. The adjustable size of the port ensures safety and makes it easy to learn (Fig. 2.3) [8]. Prophylactic antimicrobial agents are unnecessary in the perioperative period [9–12].
Fig. 2.3
Fundamental concept of gasless single-port RoboSurgeon surgery
Without the RoboSurgeon system, gasless single-port-like surgery, in which the port size is somewhat larger, can be performed following the procedures presented herein using a system with an ordinary two-dimensional endoscope and display [13, 14]. Transition from open surgery or its improvement may be accomplished without difficulty by using this procedure.
This surgery may help overcome some of the disadvantages of current laparoscopic and robot-assisted minimally invasive surgeries while retaining their major benefits and even adding some unique advantages [15].
2.2 General Concept
This surgery is carried out in a wide retroperitoneal working space made along the anatomical plane through a coin-sized single port, without gas insufflation, and assisted by the RoboSurgeon system that consists of wearable or head movement-controlled devices. For more details, see Chap. 1, Fundamentals of Gasless Single-Port RoboSurgeon Surgery.
2.3 Preoperative Preparation
Patients are provided with sufficient information, including the potential need to extend the port size in the event of difficulties, when obtaining informed consent. Patients do not receive prophylactic antimicrobial agents in the perioperative period.
2.4 Instruments
This operation can be performed with reusable and affordable devices. Disposable devices, a vessel sealing device and an ultrasonic coagulator, are usually used but can be replaced with ligation and scissors. A catcher for removing the isolated kidney is the only disposable (but affordable) device that is not replaceable. The endoscope manipulation robot works with air pressure (Aerovision® [initial version], EMARO® [second version], Riverfield, Inc.) but can also be replaced by an endoscopist. See Chap. 1 for details.
2.5 Surgical Techniques
2.5.1 Principle
All surgeons wear the 3D-HMD and obtain images in the following manner (Figs. 2.4, 2.5, 2.6, and 2.7). During the operation, the 3D-HMD provides the following six fields of vision in front of the eyes regardless of head position: magnified vision, stereovision, panoramic vision (direct vision), multivision, navigated vision, and shared vision. Using the direct vision obtained by moving the angle of sight downward, surgeons can receive instruments from the scrub nurse and can also observe the operative field to ensure safety. Through a single port, the surgeon initially inserts all instruments, including the endoscope, using direct vision and then follows them on the 3D-HMD. Each surgeon can change the direction of the images on the 3D-HMD according to his or her position, which makes it possible to share a common direction. Multivision, including navigated vision using ultrasonography via the port, can be employed if necessary.
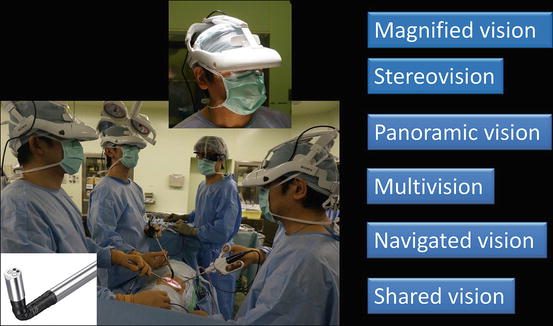
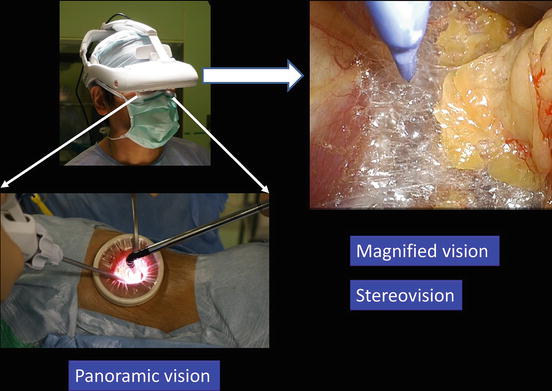
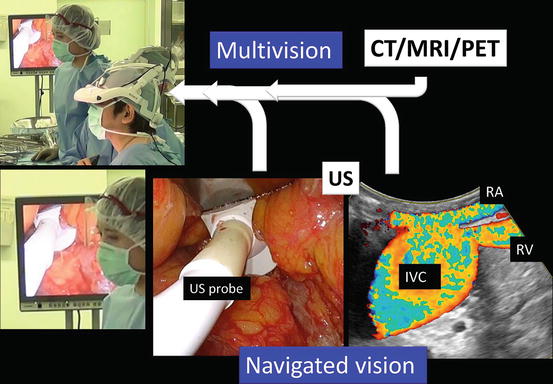
Fig. 2.4
3D-HMD provides six fields of vision in front of the eyes regardless of head position
Fig. 2.5
Magnified vision, stereovision, and panoramic vision are obtained. A wide panoramic view can be seen by moving the angle of sight downward
Fig. 2.6
Each surgeon can change the direction of the images on the display according to his or her position
Fig. 2.7
Multivision and navigated vision using ultrasonography via the port. Computed tomography (CT), magnetic resonance imaging (MRI), positron emission tomography (PET), renal artery (RA), renal vein (RV), ultrasound (US), inferior vena cava (IVC)
A wide, extraperitoneal working space is created via dissection along the steric connective tissue between the perinephric fat and the psoas muscles posteriorly and between the perinephric fat and the peritoneum anteriorly (Figs. 2.8 and 2.9). In the wide working space developed in the retroperitoneum, the following procedures are performed.
Fig. 2.8
Working space created through a single port
Fig. 2.9
Detailed view of working space created through a single port. Adrenal gland (AD)
Representative images of the extraction of the kidney with perinephric fat through the single port, which permits narrow extraction of the specimen, are presented in Fig. 2.10.
Fig. 2.10
Extraction of the kidney covered with perinephric fat
2.5.2 Flowchart of the Procedure
2.5.3 Patient Positioning
After general anesthesia is administered, the patient is placed in the flank position over the break of the table (Fig. 2.12). The supine position is employed for patients with poor cardiopulmonary function, severe osteoporosis, and so on. Surgeons put on the 3D-HMD and stand by the table as shown in Fig. 2.13. The lead surgeon stands at the dorsal side of the patient. An endoscopist or the endoscope manipulation robot and the assistant are positioned opposite the lead surgeon. The direction of the images on the lead surgeon’s 3D-HMD is reversed from those of the endoscopist/robot.
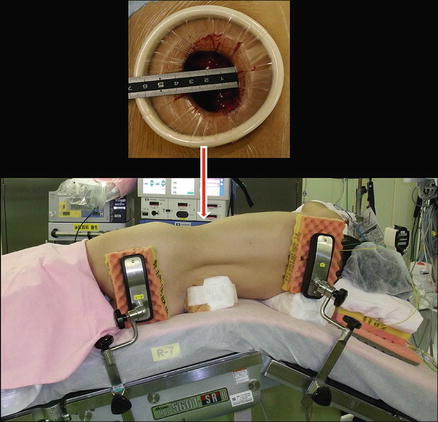
Fig. 2.12
Patient position and single port
Fig. 2.13
Surgical hand washing and surgeon’s position. Endoscope is held by a robot or endoscopist
2.5.4 Port Placement
A skin incision is made, usually 4–5 cm in length so as to permit narrow extraction of the specimen, starting at the tip of the 12th rib and running obliquely forward following the line of the 12th rib (Fig. 2.14). The size of the incision depends on the size of the tumor and the perinephric fat. The incision is extended as needed when the specimen is extracted. Muscles are split, the flank pad and the lateroconal fascia are exposed (Fig. 2.15), and the fascia is opened to expose the posterior aspect of Gerota’s fascia (Figs. 2.15 and 2.16). The tip of the 12th rib is slightly shaved if necessary. The posterior aspect of Gerota’s fascia is bluntly pushed medially using a long retractor (PLES retractor®, Innomedics Medical Instruments, Inc.), and the ureter is identified immediately (Fig. 2.17). After separating the anterior aspect of Gerota’s fascia to some extent from the peritoneum (Fig. 2.18), a wound retractor (Alexis wound retractor®, Applied Medical Resources, Corp.) is placed along Gerota’s fascia to make a single port, around 4 cm in diameter (Fig. 2.19).
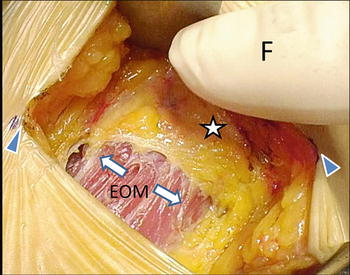
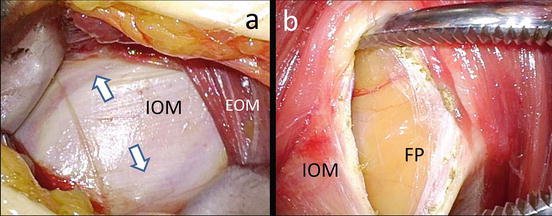
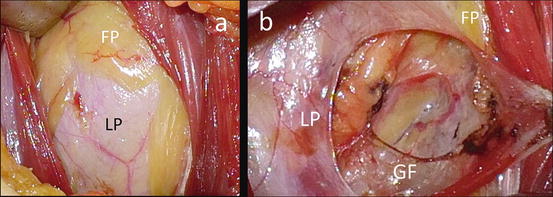
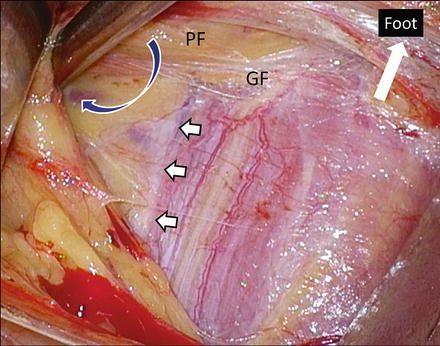
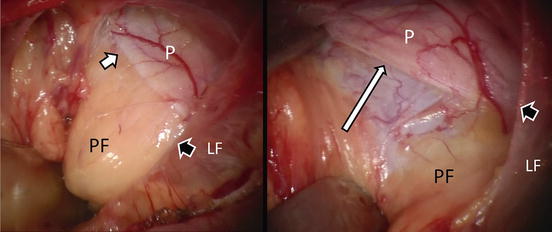
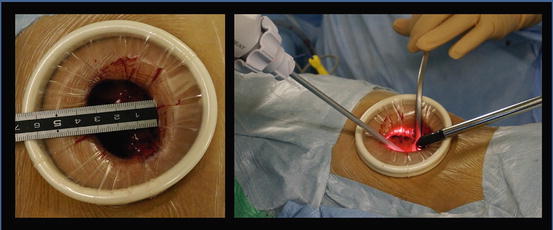
Fig. 2.14
Exposing the external oblique muscle (EOM) through a skin incision (arrow head) about two fingerbreadths in width. Split the EOM (arrow), tip of the 12th rib (☆)
Fig. 2.15
(a) Exposing the internal oblique muscle (IOM) and (b) separating it to expose the flank pad (FP)
Fig. 2.16
(a) Exposing the lateroconal fascia (LP) and (b) opening it to expose Gerota’s fascia (GF). Flank pad (FP)
Fig. 2.17
The ureter (arrows) identified by medial retraction of the posterior aspect of Gerota’s fascia. Gerota’s fascia (GF), perinephric fat (PF) covered with GF
Fig. 2.18
Plane (white arrow) between the anterior aspect of Gerota’s fascia and the peritoneum (P). Perinephric fat (PF), lateroconal fascia (LF), opened edge of the LP (black arrow)
Fig. 2.19
Single port (approximately 3 cm in diameter)
Tip The tip of the 12th rib is the key landmark for incision, which is a safe and suitable site at which to pursue the operation.
2.5.5 Holding the Ureter
Following the medial retraction of the posterior aspect of Gerota’s fascia and after dissecting along the fascia (Fig. 2.20), the ureter is partially isolated and held with a thread (Fig. 2.21). The gonadal vein is identified near the ureter.
 Gasless Single-Port RoboSurgeon Retroperitoneoscopic Pelvic Lymph Node Dissection and Inguinal Hernia Prevention
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Pelvic Lymph Node Dissection and Inguinal Hernia Prevention
 Gasless Single-Port RoboSurgeon Partial Cystectomy: A Hybrid Technique Combining an Intravesical and Extravesical Approach
Gasless Single-Port RoboSurgeon Partial Cystectomy: A Hybrid Technique Combining an Intravesical and Extravesical Approach
 Gasless Single-Port RoboSurgeon Retroperitoneoscopic Radical Prostatectomy
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Radical Prostatectomy
 Gasless Single-Port RoboSurgeon Retroperitoneoscopic Adrenalectomy
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Adrenalectomy
 Gasless Single-Port RoboSurgeon Retroperitoneoscopic Partial Nephrectomy
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Partial Nephrectomy
 Fundamentals of Gasless Single-Port RoboSurgeon Surgery
Fundamentals of Gasless Single-Port RoboSurgeon Surgery




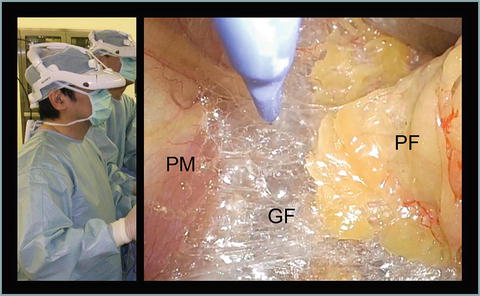
Fig. 2.20
Dissection along the steric connective tissue between the perinephric fat (PF) and the psoas muscle (PM). Gerota’s fascia (GF)
< div class='tao-gold-member'>
Only gold members can continue reading. Log In or Register to continue
Related posts:
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Pelvic Lymph Node Dissection and Inguinal Hernia Prevention
Gasless Single-Port RoboSurgeon Partial Cystectomy: A Hybrid Technique Combining an Intravesical and Extravesical Approach
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Radical Prostatectomy
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Adrenalectomy
Gasless Single-Port RoboSurgeon Retroperitoneoscopic Partial Nephrectomy
Fundamentals of Gasless Single-Port RoboSurgeon Surgery
Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
